- 东莞市信瑞智能科技有限公司
- 13066118715



产品描述
ppu机械手应运而生,它是一种新型的凸轮式拾放机械手,具有结构精密的特点。由高精度电机驱动,按照U性轨迹运行的一种简易的机械模块,应用于局限的空间内自动传输,宁波全自动机械手、拾放、搬运、移栽功能,因此也被称为PPU搬运机械手、高速移栽机械手、拾放机械手、夹放机械手。循环时间较短可达0.4S,X轴的行程可单独调整,使用5年基本没有问题。主要包括:各类型PPU搬运机械手、环型线体、直线线体、机械手快换模块、高精度机械夹手、柔性供料系统、智能储料仓、标准机体机架,同时可根据客户要求研发定制生产非标机械设备模块。实现自动化就像搭积木一样简单。解决客户工程研发试错成本高、非标配件加工与装配成本高,宁波全自动机械手、项目生产制造周期长,宁波全自动机械手、大量部件不可回收等问题。选择机械手主要从价格及质量二方面进行着手。宁波全自动机械手
使用机械手时要注意:1.机械手要有适当的夹紧力。手部工作时,应具有适当夹紧力,以确保夹持稳定可靠,变形小且不损坏棒料的己加工表面。对于刚性较差的棒料夹紧力大小应该设计得可以调节,对于本机应考虑采用自锁安全装置。2.机械手指有足够的开闭范围。工作时,一个手指开闭位置以较大变化量称为开闭范围。对于回转型手臂手指开闭范围,可用开闭和手指夹紧端长度表示。且与工作形状、尺寸等因素有关。若环境许可,开闭范围大些较好。3.机械手结构力求简单,重量轻,体积小。手擘处于腕部较前端,工作时运动状态多变,其结构,重量和体积直接影响整个机械手的结构,抓重,定位精度,运动速度等性能。所以设计时需要以上特点。宁波全自动机械手机械手的特点是可以通过编程去完成各种预期的作业。
机械手有哪几种驱动方式?机械手的驱动方式有气动、液压、电动和机械式四种。冲压机械手多数为气动或液压驱动。根据手臂运动形式的不同,机械手可以分为四种形式:直角坐标式、圆柱坐标式、较坐标式和多关节式。手臂在直角坐标系的三个坐标轴方向作直线移动,即手臂的前后伸缩、上下升降和左右移动。这种坐标形式占据空间大而工作范围却相对较小、惯性大,它适用于工作位置成直线排列的情况。机械手其一大特点是以简单的机构得到较大的工作范围,并可抓取地面上的物体。
移栽机械手的工作过程如下:在开发传感系统时,较初只采用光电传感器,发射机和接收机。当杯中的植物从发射器与接收器之间经过时,如果光线被茎或叶子挡住,就可以断定真实的苗在杯中。传感器可以上下调整以改变拒绝低于标准的劣苗的阀门,通过杯传送带的转动将劣苗抛在废料箱中。由于它能在不停止运动的情况下进行探测,所以这是较为简单、快速和经济的方法。移栽是一种很简单的,但也是很细致和很费时的工作。这种自动化移栽机械手可以使移栽速度提高4~5倍。机械手的控制分为点位控制和连续轨迹控制两种。
搬运机械手手部设计需要考虑几点:1、保证足够的夹持力;2、手指间应有较小的开闭角;3、工件在整个过程中的准确定位;4、应具有足够的强度和刚度;5、应考虑被抓取对象的要求。腕部在整个机械手中起到了重要的链接和支撑作用,在进行腕部设计时要注意几点:1、结构简单,控制重量;2、灵活可靠,良好的密封性;3、管线的布置和润滑/维修/调整;4、自由度和工作环境的影响。搬运机械手臂部设计需要考虑几点:1、保证手臂的刚度;2、良好的导向性;3、偏重力矩要小;4、平稳移动,准确定位。凸轮机械手的结构很简单。宁波全自动机械手
凸轮机械手的组装非常方便。宁波全自动机械手
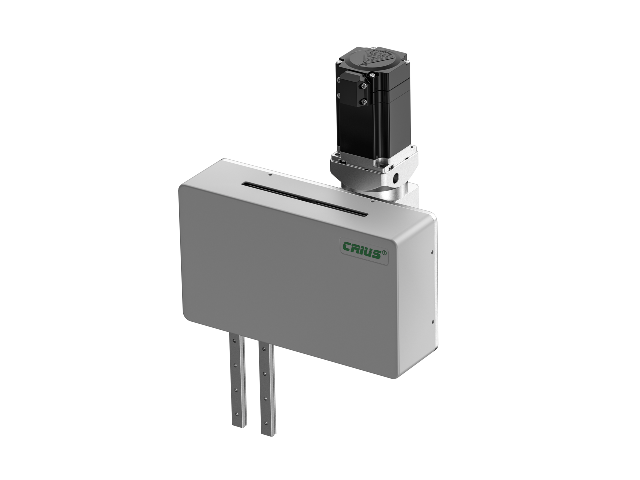
PPU机械手打样相比于传统的模组搭建或者气缸搭配使用,PPU机械手,具有速度可达0.3S,精度高(±0.02)性能稳定,适合短距离搬运,组装等工序,行程可调,Z轴通过程序可控,使用非常简单实用。PPU是纯凸轮结构移载机械手,在伺服或步进马达作用下,物件可以沿预定的轨迹运行。通过程序控制,在其行程范围内可实现任意位置停留主要用于在局促的空间内自动传送、进给和移除小零件。通过导向的垂直和水平运动顺序实现这些功能。直线导轨无回转间隙,带循环滚针轴承元件,确保了高精度和高刚性。伺服马达与凸轮系统的组合形成了紧凑的单元,用于完整的移载循环。宁波全自动机械手
东莞市信瑞智能科技有限公司致力于机械及行业设备,以科技创新实现高品质管理的追求。信瑞智能深耕行业多年,始终以客户的需求为向导,为客户提供高品质的冲压机械手,滑台,平移式机械手,旋转式机械手。信瑞智能致力于把技术上的创新展现成对用户产品上的贴心,为用户带来良好体验。信瑞智能始终关注机械及行业设备市场,以敏锐的市场洞察力,实现与客户的成长共赢。
友情链接